publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
-
 PENERAPAN KINEMATIKA TERBALIK PADA ROBOT LENGAN LIMA SENDI (5 DOF) DENGAN CITRA DIGITALFahril Maula Tanzil Huda, Yusril Ali Riza Pratama, Fauzan Ra’is Saputra, and 2 more authorsJurnal Informatika dan Teknik Elektro Terapan, 2025
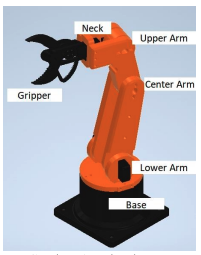
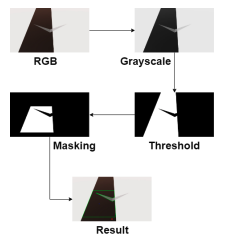
PENERAPAN KINEMATIKA TERBALIK PADA ROBOT LENGAN LIMA SENDI (5 DOF) DENGAN CITRA DIGITALFahril Maula Tanzil Huda, Yusril Ali Riza Pratama, Fauzan Ra’is Saputra, and 2 more authorsJurnal Informatika dan Teknik Elektro Terapan, 2025Perkembangan teknologi yang semakin maju memberi dampak pada sistem kendali robot, salah satunya ialah robot lengan. Sistem kendali yang sering digunakan pada lengan robot adalah kinematika terbalik dan kinematika maju. Penelitian ini membahas penerapan kinematika terbalik pada robot lengan dengan lima derajat kebebasan (5 DOF) yang diintegrasikan dengan teknologi citra digital untuk meningkatkan presisi dan efisiensi operasional. Deteksi objek dan warna dilakukan melalui pemrosesan citra yang digunakan sebagai masukan untuk algoritma kinematika terbalik. Dengan metode tersebut didapatkan keluaran berupa derajat untuk masing-masing aktuator. Berdasarkan hasil pengujian yang dilakukan kombinasi kinematika terbalik dan citra digital masih memiliki error yang cukup besar, seperti pada sumbu x dengan error tertingginya pada 4.11, sumbu y dengan error tertingginya 13 dan sumbu z dengan error 26.74. Meskipun nilai error masih cukup besar tetapi metode ini berhasil mengendalikan robot lengan 5-DOF.
-
 PERBANDINGAN KONTROL LOGIKA FUZZY DAN PID PADA ROBOT E-PUCK WALL FOLLOWING MENGGUNAKAN WEBOTSYusril Ali Riza Pratama, Bayu Wahyu Saputra, Tiara Afifah Nazmudin, and 1 more authorJurnal Informatika dan Teknik Elektro Terapan, 2025
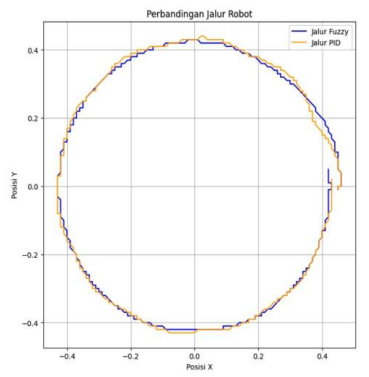
PERBANDINGAN KONTROL LOGIKA FUZZY DAN PID PADA ROBOT E-PUCK WALL FOLLOWING MENGGUNAKAN WEBOTSYusril Ali Riza Pratama, Bayu Wahyu Saputra, Tiara Afifah Nazmudin, and 1 more authorJurnal Informatika dan Teknik Elektro Terapan, 2025Penelitian ini mengeksplorasi penerapan Fuzzy Logic Control (FLC) pada robot E-Puck untuk tugas mengikuti dinding atau wall following menggunakan simulasi Webots. serta membandingkan efisiensi antara sistem FLC dan Proportional-Integral-Derivative (PID). Robot E-Puck dilengkapi dengan sensor proximity inframerah untuk mendeteksi dan mempertahankan jarak yang stabil dari dinding. Logika Fuzzy dipilih karena kemampuannya dalam menangani ketidakpastian dan membuat keputusan adaptif dalam lingkungan yang dinamis. Proses kontrol FLC meliputi fuzzifikasi data sensor, inferensi menggunakan aturan IF-THEN, dan defuzzifikasi untuk menghasilkan sinyal kontrol crisp yang mengatur motor robot. Hasil pengujian menunjukkan bahwa FLC menghasilkan gerakan yang lebih stabil dibandingkan dengan kontrol PID, dengan nilai error rata-rata sebesar -3.32 untuk FLC dibandingkan dengan -13.39 untuk PID. Namun kontrol FLC memiliki nilai waktu puncak 3.71 detik sedangkan PID memiliki nilai waktu puncak 2.24 yang berarti kontrol PID lebih responsif dibandingkan dengan kontrol FLC. Secara keseluruhan, FLC lebih efektif dalam mengontrol gerakan robot dalam tugas wall following, sedangkan kontrol PID lebih efektif dalam mendapatkan respons yang lebih cepat.
-
 IMPLEMENTASI LOGIKA FUZZY DALAM PENGHINDARAN HAMBATAN ROBOT E-PUCK PADA LINGKUNGAN STATISFauzan Rais Saputra, Rizanurfadli Hadiazzaka, Sahat Ramses Simsay Silalahi, and 1 more authorJEIS: Jurnal Elektro dan Informatika Swadharma, 2025
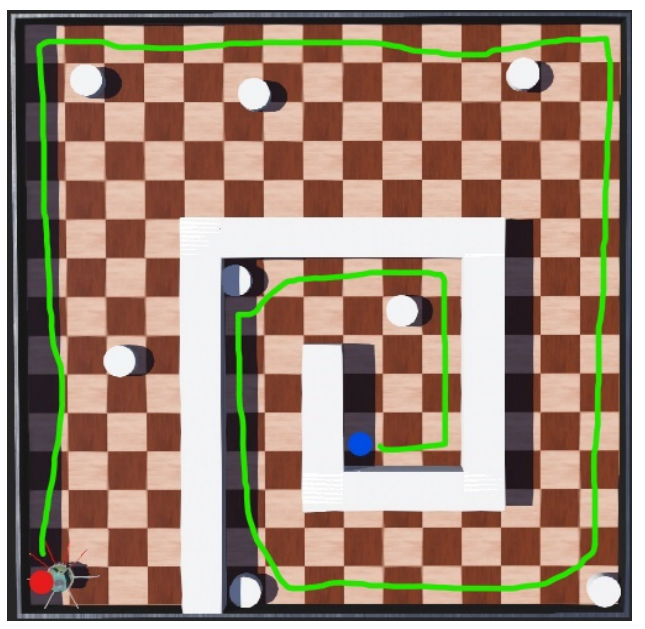
IMPLEMENTASI LOGIKA FUZZY DALAM PENGHINDARAN HAMBATAN ROBOT E-PUCK PADA LINGKUNGAN STATISFauzan Rais Saputra, Rizanurfadli Hadiazzaka, Sahat Ramses Simsay Silalahi, and 1 more authorJEIS: Jurnal Elektro dan Informatika Swadharma, 2025This research compares the performance of two control methods, PID and Fuzzy Logic Controller, in controlling the E-puck robot for navigation and obstacle avoidance. This research aims to determine a more efficient and adaptive method for dealing with dynamic environmental complexity. The research was conducted in a laboratory using an E-puck robot and a Webots simulator. The methods used include observation, interviews, and literature study. The E-puck robot was tested in two simulation arenas with different levels of obstacle complexity. The PID method uses proportional (P), integral (I), and derivative (D) components, while the Fuzzy Logic Controller uses if-then rules based on fuzzy logic. Test results show that the PID method is faster in arenas with fewer obstacles, with an average time of 1 minute 4.5 seconds, compared to Fuzzy Logic, which requires 1 minute 5.4 seconds. However, in arenas with more obstacles, the Fuzzy Logic method is more efficient, with an average time of 1 minute 12.9 seconds, while the PID method requires 1 minute 16.8 seconds. This research concludes that although each control method has advantages and limitations, their combination can offer a more adaptive and efficient solution in dynamic environments. The results of this research significantly contribute to the development of robotics technology and practical applications in various industrial sectors.
-
 Marker-Based autonomous quadrotor tracking for ground mobile robotsArdy Seto Priambodo, Oktaf Agni Dhewa, Aris Nasuha, and 3 more authorsIn AIP Conference Proceedings, 2025
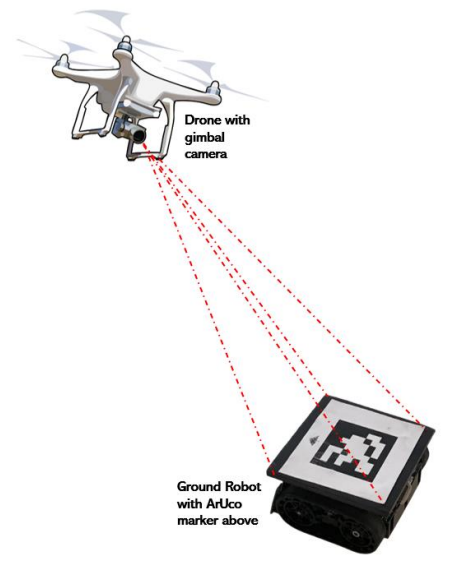
Marker-Based autonomous quadrotor tracking for ground mobile robotsArdy Seto Priambodo, Oktaf Agni Dhewa, Aris Nasuha, and 3 more authorsIn AIP Conference Proceedings, 2025Quadcopters, as highly maneuverable and versatile aerial robots, play a pivotal role in expanding the operational capabilities of autonomous systems. They are, however, often confronted with the intricate challenge of achieving precise tracking of moving objects on the ground, a capability crucial for effective interaction and coordination between aerial and ground-based robots. This paper delves into addressing this precision challenge by implementing ArUco markers as a solution to enhance the accuracy and reliability of quadrotor tracking. ArUco markers offer distinct advantages, providing stable and reliable reference points allowing the quadcopter to autonomously track ground mobile robots with increased precision and responsiveness. The study integrates a Proportional-Integral-Derivative (PID) controller designed to calculate and rectify the output signal based on the positional error derived from the detected ArUco markers, enabling the quadrotor to make real-time adjustments and maintain optimal proximity to the moving object. Simulations conducted using Webots reveal promising results; the quadcopter effectively followed the ground mobile robot with an average level of positional error of 0.31 meters in the X-axis and 0.07 meters in the Y-axis. These results underscore the efficacy and robustness of the marker-based tracking system, emphasizing its potential applicability in various real-world scenarios, such as search and rescue missions and cooperative exploration. The integration of ArUco markers and PID control demonstrates significant advancements in autonomous quadrotor tracking for ground mobile robots and lays down a foundational framework for future research in multi-robot collaborative systems.




2024
-
 Pengendalian RPM pada Motor DC Encoder dengan PID Controller berbasis SimulinkTsany Ammar Rasyid, Sheisya Rhieyanetta Divanny, Rizqi Dwi Arifuddin, and 3 more authorsJurnal Teknik Elektro Uniba (JTE UNIBA), 2024
Pengendalian RPM pada Motor DC Encoder dengan PID Controller berbasis SimulinkTsany Ammar Rasyid, Sheisya Rhieyanetta Divanny, Rizqi Dwi Arifuddin, and 3 more authorsJurnal Teknik Elektro Uniba (JTE UNIBA), 2024Penelitian ini fokus pada pengembangan serta implementasi sistem kontrol kecepatan motor DC dengan memanfaatkan pendekatan PID (Proportional Integral Derivative) dalam bahasa pemrograman C++. Motor DC memiliki peran krusial dalam berbagai aplikasi di bidang teknik dan otomatis. Pengaturan kecepatan yang akurat pada motor DC menjadi kunci utama untuk mencapai hasil yang diharapkan dalam berbagai aplikasi. Dalam penelitian ini, kami mengintegrasikan penggunaan sensor encoder untuk mengukur putaran per menit (RPM) motor DC dan menerapkan algoritma PID menggunakan bahasa pemrograman C++ untuk mengatur kecepatan motor. Penerapan metode PID memungkinkan kendali yang akurat dan responsif terhadap perubahan kecepatan yang diinginkan, dengan tujuan mencapai nilai referensi tertentu. Hasil percobaan menunjukkan bahwa sistem ini mampu memberikan kendali yang efektif dan menghasilkan respon yang konsisten terhadap perubahan kecepatan, sesuai dengan nilai RPM yang diinginkan. Penelitian ini berkontribusi pada pemahaman yang lebih dalam tentang penerapan PID dalam mengendalikan motor DC dan memperluas pengetahuan terkait bahasa pemrograman C++, yang dapat menjadi dasar untuk praktis penerapan dalam berbagai bidang yang memerlukan pengendalian yang canggih pada motor DC.
-
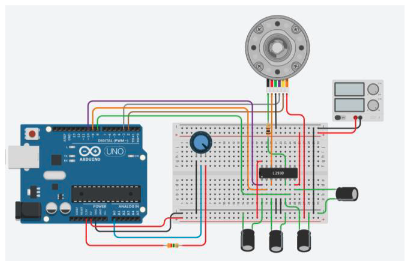
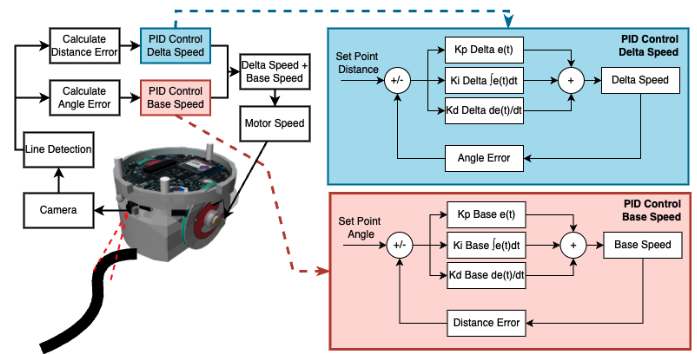 Integrated Implementation of Computer vision and PID Control for Dynamic Speed Control of Line follower RobotArdy Seto Priambodo, Aris Nasuha, and Oktaf Agni DhewaTelekontran: Jurnal Ilmiah Telekomunikasi, Kendali dan Elektronika Terapan, 2024
Integrated Implementation of Computer vision and PID Control for Dynamic Speed Control of Line follower RobotArdy Seto Priambodo, Aris Nasuha, and Oktaf Agni DhewaTelekontran: Jurnal Ilmiah Telekomunikasi, Kendali dan Elektronika Terapan, 2024This research aims to develop a dynamic speed control system for line follower robots by integrating computer vision technology and PID control. The main challenge in controlling line follower robots is maintaining stability and speed while navigating various types of turns and complex paths. This study proposes the use of computer vision to detect paths more accurately and responsively, and PID control to dynamically adjust the robot’s speed based on detected errors. The research methods involve simulating the e-puck robot in a Webots environment, developing algorithms for black line detection and error calculation, and designing the PID control system. The test results show that in Arena 1, the completion time with fixed base speed is 58.08 seconds, while with dynamic base speed it is 50.386 seconds, indicating a 13.3% reduction in completion time. In Arena 2, the completion time with fixed base speed is 71.584 seconds, while with dynamic base speed it is 66.624 seconds, indicating a 6.9% reduction in completion time. Thus, this control system is more effective in keeping the robot on the desired path, reducing deviations and improving path tracking accuracy.
-
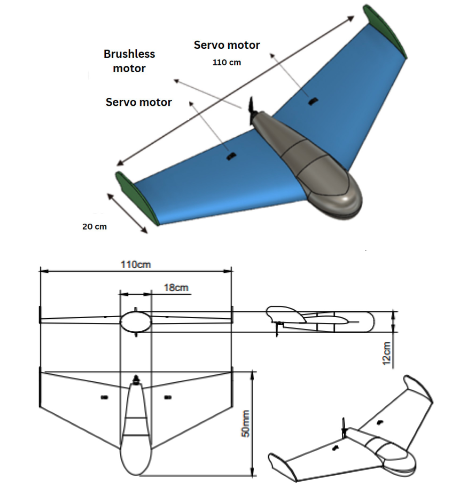 Attitude UAV Stability Control Using Linear Quadratic Regulator-Neural Network (LQR-NN)Oktaf Agni Dhewa, Fatchul Arifin, Ardy Seto Priambodo, and 2 more authorsIIUM Engineering Journal, 2024
Attitude UAV Stability Control Using Linear Quadratic Regulator-Neural Network (LQR-NN)Oktaf Agni Dhewa, Fatchul Arifin, Ardy Seto Priambodo, and 2 more authorsIIUM Engineering Journal, 2024The stability of an Unmanned Aerial Vehicle (UAV) attitude is crucial in aviation to mitigate the risk of accidents and ensure mission success. This study aims to optimize and adaptively control the flight attitude stability of a flying wing-type UAV amidst environmental variations. This is achieved through the utilization of Linear Quadratic Regulator-Neural Network (LQR-NN) control, wherein the Neural Network predicts the optimal K gain value by fine-tuning Q and R parameters to minimize system errors. An online learning neural network adjusts the K value based on real-time error feedback, enhancing system performance. Experimental results demonstrate improved stability metrics: for roll angle stability, a rise time of 0.4682 seconds, settling time of 1.3819 seconds, overshoot of 0.298%, and Steady State Error (SSE) of 0.133 degrees; for pitch angle stability, a rise time of 0.2309 seconds, settling time of 0.7091 seconds, overshoot of 0.1224%, and Steady State Error (SSE) of 0.0239 degrees. The LQR-NN approach effectively reduces overshoot compared to traditional Linear Quadratic Regulator (LQR) control, thereby minimizing oscillations. Furthermore, LQR-NN can minimize the Steady State Error (SSE) to 0.074 degrees for roll rotation motion and 0.035 degrees for pitch rotation motion.
-
 Sistem Kendali Fuzzy Untuk Robot Mobile: Studi Kasus Pelacakan Objek Bergerak Menggunakan Simulasi WebotsFredy Tri Hartadi, Bagus Arya Wicaksana, Hendro Saputro, and 1 more authorJurnal Informatika dan Teknik Elektro Terapan, 2024
Sistem Kendali Fuzzy Untuk Robot Mobile: Studi Kasus Pelacakan Objek Bergerak Menggunakan Simulasi WebotsFredy Tri Hartadi, Bagus Arya Wicaksana, Hendro Saputro, and 1 more authorJurnal Informatika dan Teknik Elektro Terapan, 2024Dalam era perkembangan teknologi robotika yang semakin maju, implementasi sistem kendali menjadi sangat penting dalam berbagai aplikasi, termasuk logistik, pengawasan, dan layanan kesehatan. Penelitian ini mengembangkan dan menguji sistem pengendalian robot menggunakan fuzzy logic untuk mendeteksi dan mengikuti objek bergerak berwarna biru dalam lingkungan dinamis. Penggunaan fuzzy logic dipilih karena kelebihannya dalam menangani ketidakpastian dan dinamika lingkungan yang kompleks dibandingkan dengan metode pengendalian tradisional seperti PID. Robot Khepera IV digunakan sebagai platform, dan simulasi dilakukan menggunakan software Webots. Sistem ini mengintegrasikan sensor kamera untuk pendeteksian objek dan sensor inframerah untuk penghindaran rintangan. Hasil percobaan menunjukkan bahwa sistem kendali fuzzy logic yang dikembangkan mampu mengikuti objek dengan baik, menunjukkan waktu rise time yang cepat bernilai 0,384 detik, dan tidak mengalami overshoot. Penelitian ini membuktikan bahwa fuzzy logic efektif dalam pengendalian robot untuk pelacakan objek berwarna, dengan hasil terbaik menunjukkan rata-rata error yang rendah yaitu -1,687 dan respon kendali yang responsif terhadap perubahan posisi objek.
-
 PENERAPAN OPENCV DAN FUZZY LOGIC CONTROLLER UNTUK LINE FOLLOWER BERBASIS KAMERA PADA SIMULASI ROBOT E-PUCK DI WEBOTSSheisya Rhieyanetta Divanny, Zaki Nugraha, Muhammad Ifan Ghaffar, and 3 more authorsJurnal Informatika dan Teknik Elektro Terapan, 2024
PENERAPAN OPENCV DAN FUZZY LOGIC CONTROLLER UNTUK LINE FOLLOWER BERBASIS KAMERA PADA SIMULASI ROBOT E-PUCK DI WEBOTSSheisya Rhieyanetta Divanny, Zaki Nugraha, Muhammad Ifan Ghaffar, and 3 more authorsJurnal Informatika dan Teknik Elektro Terapan, 2024Perkembangan teknologi berkembang ke berbagai bidang termasuk industri, dan robot seperti robot line-following merupakan salah satu teknologi yang berkembang pesat untuk meningkatkan efisiensi produksi. Penelitian ini bertujuan untuk mengembangkan sistem kendali logika fuzzy pada robot e-puck yang dilengkapi dengan kamera pelacak garis. Penelitian ini menggunakan teknik observasi literatur terkait robot pelacak garis, perancangan robot dan kamera, perancangan algoritma pengolahan citra dan perancangan algoritma fuzzy logic controller. Kamera E-Puck digunakan untuk mendeteksi garis, data gambar diolah menggunakan algoritma OpenCV, dan logika fuzzy diimplementasikan untuk mengendalikan pergerakan robot. Robot ditentukan berdasarkan nilai error dan delta error yang ditentukan dari pengukuran kamera. Hasil pengujian menunjukkan bahwa robot dapat melacak lintasan dalam berbagai bentuk, dengan nilai error rata-rata 85 piksel dan nilai error delta rata-rata 0,1 piksel, serta motor dapat menggerakkan robot sepanjang gerak lintasan yang terdeteksi dapat merespons dengan tepat. Berkontribusi pada pengembangan sistem robot pelacak garis yang andal menggunakan kombinasi kamera dan logika fuzzy.
-
 Implementasi Fuzzy Logic Controller untuk Kendali Robot Line Follower berbasis Computer VisionFahril Maula Tanzil Huda, Fajri Saputra Rahmat, Damianus Cahyo Widi Nugroho, and 3 more authorsAviation Electronics, Information Technology, Telecommunications, Electricals, and Controls (AVITEC), 2024
Implementasi Fuzzy Logic Controller untuk Kendali Robot Line Follower berbasis Computer VisionFahril Maula Tanzil Huda, Fajri Saputra Rahmat, Damianus Cahyo Widi Nugroho, and 3 more authorsAviation Electronics, Information Technology, Telecommunications, Electricals, and Controls (AVITEC), 2024Robotika telah menjadi kebutuhan primer di bidang industri. Perkembangannya sangat cepat, bahkan saat ini fokus utama di bidang teknologi merupakan bidang robotika. Dalam pengembangannya, robot membutuhkan sebuah kontrol agar mampu dimanfaatkan dengan baik yang disebut sebagai sistem kendali. Penelitian ini bertujuan untuk membuktikan implementasi sistem kendali fuzzy dengan metode citra digital. Aplikasi yang dimanfaatkan pada penelitian ini adalah software Webots dengan robot e-puck, sehingga penelitian ini berfokus dengan simulasi. Sistem kendali fuzzy dengan metode citra digital terbukti mampu digunakan sebagai kontrol robot secara efisien pada dua skema jalur, A dan B. Hasil penelitian menunjukkan robot berhasil melewati kedua jalur dengan modus error 0. Selain itu, robot menghasilkan rata-rata nilai error sebesar -11,54 piksel dan -3,11 piksel pada masing-masing jalur. Hal ini menunjukkan error yang relatif kecil dan performa robot sangat baik.
-
 Advanced Multimodal Emotion Recognition for Javanese Language Using Deep LearningFatchul Arifin, Aris Nasuha, Ardy Seto Priambodo, and 2 more authorsIndonesian Journal of Electrical Engineering and Informatics (IJEEI), 2024
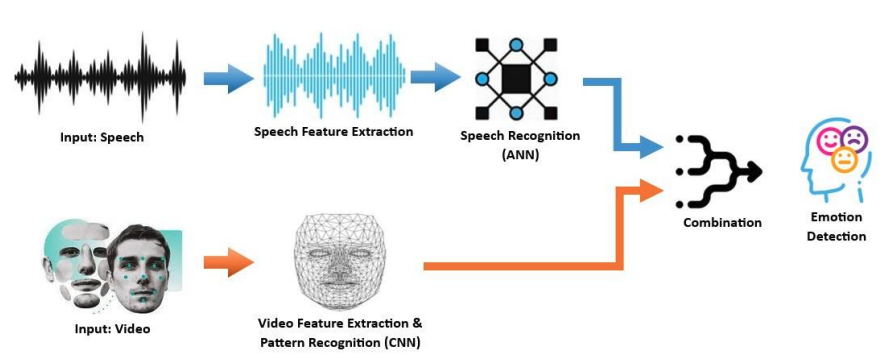
Advanced Multimodal Emotion Recognition for Javanese Language Using Deep LearningFatchul Arifin, Aris Nasuha, Ardy Seto Priambodo, and 2 more authorsIndonesian Journal of Electrical Engineering and Informatics (IJEEI), 2024This research develops a robust emotion recognition system for the Javanese language using multimodal audio and video datasets, addressing the limited advancements in emotion recognition specific to this language. Three models were explored to enhance emotional feature extraction: the SpectrogramImage Model (Model 1), which converts audio inputs into spectrogram images and integrates them with facial images for emotion labeling; the Convolutional-MFCC Model (Model 2), which leverages convolutional techniques for image processing and Mel-frequency cepstral coefficients for audio; and the Multimodal Feature-Extraction Model (Model 3), which independently processes video and audio features before integrating them for emotion recognition. Comparative analysis shows that the Multimodal Feature-Extraction Model achieves the highest accuracy of 93%, surpassing the Convolutional-MFCC Model at 85% and the Spectrogram-Image Model at 71%. These findings demonstrate that effective multimodal integration, mainly through separate feature extraction, significantly enhances emotion recognition accuracy. This research improves communication systems and offers deeper insights into Javanese emotional expressions, with potential applications in human-computer interaction, healthcare, and cultural studies. Additionally, it contributes to the advancement of sophisticated emotion recognition technologies.
-
 Pengembangan Mini Drone Berbasis ESP32 dengan Roll dan Pitch Control Menggunakan Algoritma PIDMuhammad Dzaki Al Haidar, Elshinta Adelia Ryzty, Rizky Ramadhan, and 3 more authorsElectrician: Jurnal Rekayasa dan Teknologi Elektro, 2024
Pengembangan Mini Drone Berbasis ESP32 dengan Roll dan Pitch Control Menggunakan Algoritma PIDMuhammad Dzaki Al Haidar, Elshinta Adelia Ryzty, Rizky Ramadhan, and 3 more authorsElectrician: Jurnal Rekayasa dan Teknologi Elektro, 2024A drone, or UAV (Unmanned Aerial Vehicle), is an aircraft that can be operated from a distance. Controlled by a pilot through remote control or having autonomy capabilities. Drones operate on the principle of the lifting power generated by the rotation of the beam-beam controlled by a rotor or electric motor. When the drones are activated, the control system will stabilize the drone using the stabilize feature. Furthermore, when the user controls the drone through a remote control device, the change in the angle of the sensor will be detected. When the x-axis on the joystick is more positive, the drone will automatically move on the negative x axis. On the contrary, if the x -axis of the joystick is more negative, the Drone automatically moves on the positive x as well for the y axis. In the implementation of PID controllers, the motor speed at the maximum moment is used for the maximum limit so that at the time of use the motor values are not excessive when responding when the error value on the sensor is at maximum. However, the result of the determination of the maximum PWM value did not work properly, because the mechanics made were not accurate so that at the first to final trial there was a difference of position at the initial determination. The PID control system applied to this drone still shows a tendency to experience movements that exceed the desired values, especially in the pitch and roll axes.
-
 Benchmark Analysis of Sampling Methods for RRT Path PlanningGilang Nugraha Putu Pratama, Oktaf Agni Dhewa, Ardy Seto Priambodo, and 4 more authorsControl Systems and Optimization Letters, 2024
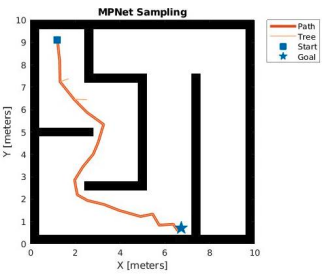
Benchmark Analysis of Sampling Methods for RRT Path PlanningGilang Nugraha Putu Pratama, Oktaf Agni Dhewa, Ardy Seto Priambodo, and 4 more authorsControl Systems and Optimization Letters, 2024Path planning is a crucial aspect of mobile robot navigation, ensuring that robots can safely travel from their initial position to the goal. In real-world applications, path planning is essential for autonomous vehicles, drones, warehouse robots, and rescue robots to navigate complex environments efficiently and safely. One effective method for path planning is the Rapidly-exploring Random Tree (RRT) algorithm, which is particularly practical in maze-like environments. The performance of RRT depends on the sampling methods used to explore the maze. Sampling methods are important because they determine how the algorithm explores the search space, affecting the efficiency and success of finding an optimal path. Poor sampling can lead to suboptimal or infeasible paths. In this study, we investigate different sampling strategies for RRT, specifically focusing on uniform sampling, Gaussian sampling, and the Motion Planning Network (MPNet) sampling. MPNet leverages a neural network trained on past environments, allowing it to predict promising regions of the search space quickly, unlike traditional methods like RRT that rely on random exploration without prior knowledge. This makes MPNet much faster and more efficient, especially in complex or high-dimensional spaces. Through a benchmarking analysis, we compare these methods in terms of their effectiveness in generating feasible paths. The results indicate that while all three methods are effective, MPNet sampling outperforms uniform and Gaussian sampling, particularly in terms of path length. The mean path length generated, based on a sample size of 30, is 13.115 meters for MPNet, which is shorter compared to uniform and Gaussian sampling, which are 18.27 meters and 18.088 meters, respectively. These findings highlight the potential to enhance path planning algorithms using learning-based sampling methods.
-
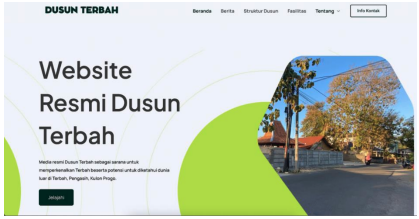 Optimalisasi Potensi Dusun Terbah Serut Kulon Progo melalui Media Digital Berbasis WebsiteTri Hadi Karyono, Oktaf Agni Dhewa, Faris Yusuf Baktiar, and 2 more authorsJurnal Abdi Masyarakat Indonesia, 2024
Optimalisasi Potensi Dusun Terbah Serut Kulon Progo melalui Media Digital Berbasis WebsiteTri Hadi Karyono, Oktaf Agni Dhewa, Faris Yusuf Baktiar, and 2 more authorsJurnal Abdi Masyarakat Indonesia, 2024Keterbatasan akses informasi di Dusun Terbah dan Serut menghambat promosi potensi lokal. Teknologi digital, seperti website, menawarkan solusi untuk memperluas akses informasi. Melalui website, masyarakat dapat dengan mudah mengakses dan menyebarkan informasi. Kegiatan pengabdian ini bertujuan membangun sistem informasi berbasis website dan melakukan transfer pengetahuan untuk pengelolaannya. Website ini diharapkan mampu menyajikan informasi kegiatan dusun serta mempromosikan potensi lokal secara cepat dan akurat. Teknologi yang digunakan adalah CMS Wordpress dengan MySQL sebagai basis data, dan website di-hosting agar dapat diakses kapan saja. Pengabdian ini mencakup dua aktivitas utama: pengembangan aplikasi selama tiga bulan dan pelatihan melalui empat kali workshop di kantor dusun. Hasilnya, website berhasil meningkatkan visibilitas potensi lokal serta keterlibatan masyarakat. Pelatihan berjalan lancar dan mendapat respons positif dari peserta, termasuk kepala dukuh dan pengelola, yang kini lebih sadar bahwa website bukan hanya alat informasi, tetapi juga media promosi. Kegiatan ini mendorong pengelola dusun untuk lebih aktif dalam mengelola dan mempromosikan potensi lokal.
-
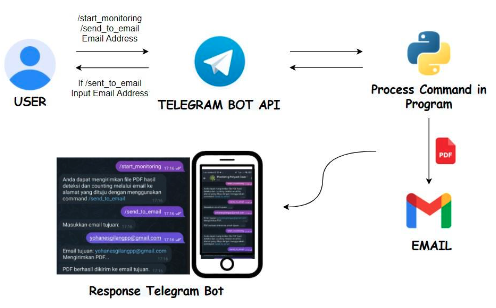 Eggplant Leaf Diseases Detection and Counting System on Agricultural Robot Based on YOLOv8Yohanes Gilang Prasaja Putra, and Ardy Seto PriambodoJELIKU (Jurnal Elektronik Ilmu Komputer Udayana), 2024
Eggplant Leaf Diseases Detection and Counting System on Agricultural Robot Based on YOLOv8Yohanes Gilang Prasaja Putra, and Ardy Seto PriambodoJELIKU (Jurnal Elektronik Ilmu Komputer Udayana), 2024Eggplants play an important role in Indonesia’s economic and food sectors. Production increases yearly, but diseases such as earworm, flea beetle, leaf spot, and leafhopper cause significant losses. Additionally, manual disease detection methods are time-consuming and prone to errors. This research develops an automated system using YOLOv8 and the Telegram Bot system to detect and count eggplant leaf diseases. The YOLOv8 algorithm can detect objects in videos or images quickly and accurately in real-time. The model uses the OpenVINO format for faster inference compared to PyTorch. The research results show that the YOLOv8 model achieved a mAP50 of 0.606. This system effectively detects, tracks, and counts eggplant leaf diseases and can send PDF files via email through the Telegram Bot. Accuracy evaluation shows an accuracy rate of 98% from the confusion matrix, with video testing showing the highest accuracy variation at 97.05% and the lowest at 23.07%. These results indicate that the automated eggplant leaf disease detection system has great potential to help agriculture prevent eggplant diseases more efficiently and accurately, supporting increased production and quality of harvests











2023
-
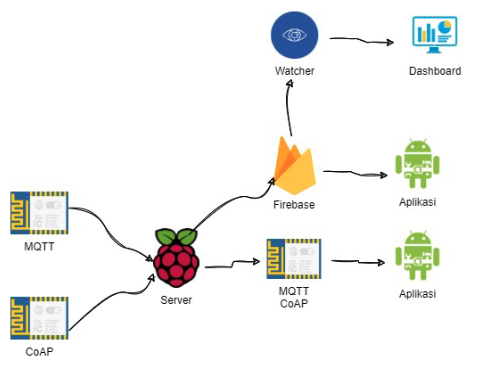 MQTT and CoAP Communication Protocol Analysis in Internet of Things System for Strawberry Hydroponic PlantsNilam Andi Safitri, and Ardy Seto PriambodoJournal of Robotics, Automation, and Electronics Engineering, 2023
MQTT and CoAP Communication Protocol Analysis in Internet of Things System for Strawberry Hydroponic PlantsNilam Andi Safitri, and Ardy Seto PriambodoJournal of Robotics, Automation, and Electronics Engineering, 2023Strawberry is a fruit that is widely consumed and cultivated globally because of its richness in nutrients, vitamins, and minerals. However, several challenging factors that need to be faced in strawberry cultivation are temperature, humidity, lighting, etc. The author focuses on the application of IoT in container strawberries, especially in high-temperature advertisements. Where Hardware, Back End and Front End are important frameworks for developing the system. In developing a system that utilizes IoT technology optimally andefficiently, it is necessary to consider the lines of communication. Without an eligible communication, the device cannot be connected smoothly. In thisstudy the authors will focus on Back End to analyze the performance of the two protocols MQTT and CoAP. The MQTT protocol is better used for IoT-based hydroponic plant automation systems because the MQTT protocol can configure messages/packets sent. MQTT can provide efficient and reliable communications in the IoT environment. In addition, the development of the prototype of strawberry cultivation using the container aims toallow strawberry farmers to control the plants without having to be near the plants.
-
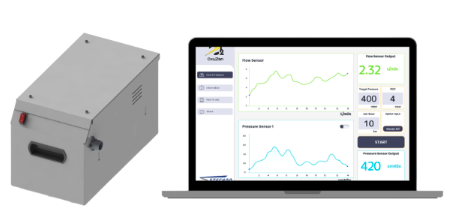 Quality Control Patient Trigger Ventilator using Negative Air PressureRahman Maulana Jundika, and Ardy Seto PriambodoJournal of Robotics, Automation, and Electronics Engineering, 2023
Quality Control Patient Trigger Ventilator using Negative Air PressureRahman Maulana Jundika, and Ardy Seto PriambodoJournal of Robotics, Automation, and Electronics Engineering, 2023This research aims to develop a quality control tool for patient trigger ventilators at PT Stechoq Robotika Indonesia. The increasing demand for ventilators has driven PT Stechoq Robotika Indonesia to create high-end ventilators. However, the production process faces challenges, particularly in the manual quality control of patient trigger alarms. Therefore, an automated quality control tool is needed to replace the manual mechanism. The research utilizes the Research and Development method. Trials are conducted on SIMV and CPAP modes with variations in pressure trigger and flow trigger parameters to evaluate the performance of patient trigger alarms on ventilators. The results of implementing the patient trigger quality control tool show an average accuracy rate of 70% for pressure and flow triggers in SIMV and CPAP modes. This tool is expected to reduce time and effort in the quality control process while improving the accuracy of triggering patient alarms on ventilators. Overall, the patient trigger ventilator quality control tool has significant potential in the ventilator industry, with positive implications for product quality and production efficiency at PT Stechoq Robotika Indonesia.
-
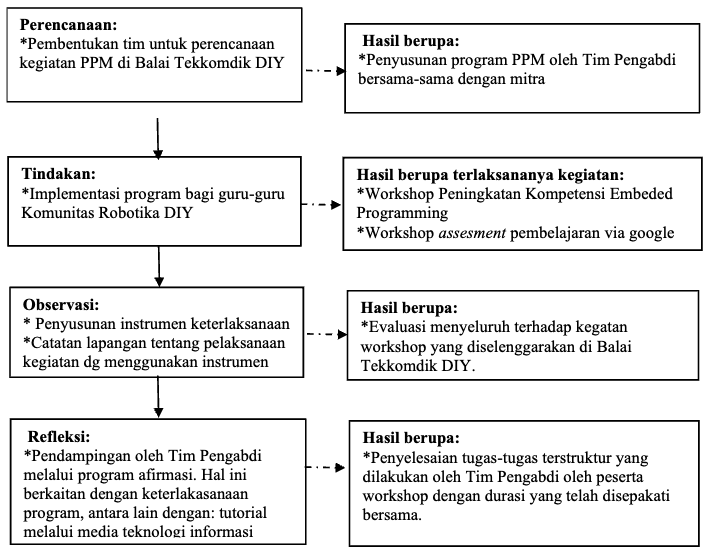 Peningkatan Kompetensi Embedded Programming pada Guru Komunitas Robotika pada Balai Tekkomdik DIYArdy Seto Priambodo, Gilang Nugraha Putu Pratama, Oktaf Agni Dhewa, and 1 more authorJurnal Pengabdian Masyarakat Indonesia, 2023
Peningkatan Kompetensi Embedded Programming pada Guru Komunitas Robotika pada Balai Tekkomdik DIYArdy Seto Priambodo, Gilang Nugraha Putu Pratama, Oktaf Agni Dhewa, and 1 more authorJurnal Pengabdian Masyarakat Indonesia, 2023Komunitas Robotika adalah suatu wadah atau komunitas untuk berkumpul, berbagi informasi dan wawasan terbaru kaitannya dengan keahlian robotika. Kegiatan PPM yang telah dilakukan bertujuan untuk meningkatkan keterampilan dan wawasan baik pada perangkat keras sistem tertanam maupun pemrograman. Materi difokuskan dengan tujuan mengenal dan memanfaatkan secara mendalam perangkat IoT ESP32, mulai dari pengenalan alat, konfigurasi, instalasi IDE, pengenalan sensor-aktuator, komunikasi antar perangkat ESP32, hubungan dengan IoT Platform, pemilihan protokol komunikasi sampai pada keamanan perangkat. Kegiatran PPM sukses dilaksanakan dengan dihadiri 24 guru-guru komunitas robotika yang berlokasi di Balai Tekkomdik DIY. Kegiatan berlangsung selama 2 hari yaitu pada tgl 11-12 Juli 2023. Guru -guru komunitas robotika antusias untuk memanfaatkan ESP32 dan diharapkan dapat membawa wawasan baru tersebut ke sekolahnya masing-masing.
-
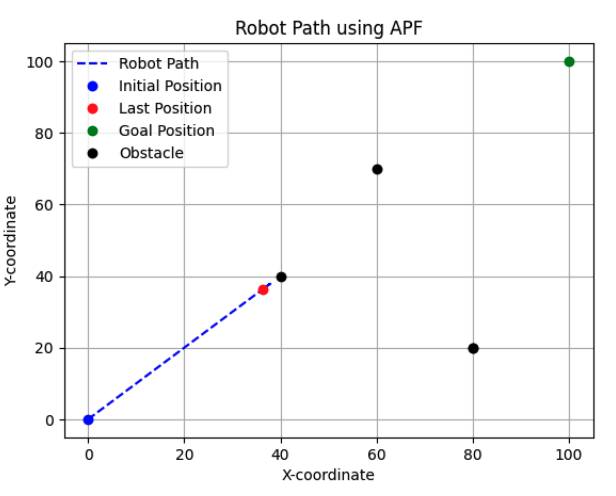 A Modified Artificial Potential Field using Perpendicular Force for Leader-Follower SystemGilang Nugraha Putu Pratama, Mentari Putri Jati, Ardy Seto Priambodo, and 2 more authorsIn 2023 6th International Conference on Information and Communications Technology (ICOIACT), 2023
A Modified Artificial Potential Field using Perpendicular Force for Leader-Follower SystemGilang Nugraha Putu Pratama, Mentari Putri Jati, Ardy Seto Priambodo, and 2 more authorsIn 2023 6th International Conference on Information and Communications Technology (ICOIACT), 2023Artificial potential field (APF) is a path planning strategy that is widely used in robotics. Unfortunately, it is susceptible to local minima problems, especially on Symmetrically Aligned Robot-Obstacle-Goal (SAROG) configurations. In this paper, we propose a modified APF by introducing the perpendicular force for escaping the local minima. Furthermore, it is also being implemented for the leader-follower system. Here, the leader is assigned to reach the goal while avoiding obstacles. Simultaneously, the follower needs to track the leader while maintaining a safe distance. The effectiveness of our proposed method is verified by numerical simulations. The results show that the modified APF using perpendicular prevails in guiding the leader to reach the goal. At the same time, the follower can maintain a tolerated distance from the leader.
-
 Implementasi Fuzzy Logic dengan sistem Visual Camera pada Robot Jetbot sebagai Line FollowerYudha Febrian, Rasyid Ammary Yahya, Muhamnmad Ibrah Dzaluli, and 1 more authorElectrician: Jurnal Rekayasa dan Teknologi Elektro, 2023
Implementasi Fuzzy Logic dengan sistem Visual Camera pada Robot Jetbot sebagai Line FollowerYudha Febrian, Rasyid Ammary Yahya, Muhamnmad Ibrah Dzaluli, and 1 more authorElectrician: Jurnal Rekayasa dan Teknologi Elektro, 2023Aplikasi yang mengandalkan input visual untuk robot Jetbot yang mengikuti garis. Kamera berfungsi sebagai sensor utama, dan metode pemisahan gambar yang disesuaikan digunakan untuk memproses buffer gambar. Metode ini mengekstrak data yang diperlukan untuk pengontrol robot agar berfungsi dengan baik bahkan di lingkungan yang kurang cahaya. Robot ditugaskan untuk mengikuti jalur yang telah ditentukan sebelumnya pada permukaan lantai hitam yang ditandai dengan garis putih. Hasil percobaan menunjukkan keberhasilan navigasi robot di sepanjang jalur. Metode ini dapat diandalkan dan tangguh, serta mudah diadaptasi untuk digunakan dalam konteks lain, termasuk lingkungan industri yang biasanya menggunakan transduser dan sensor yang mahal. Dalam pengujian penelitian kami, kami berhasil mengamati peningkatan yang signifikan dalam perkembangan garis gerak robot dengan menggunakan teknik logika fuzzy dan pustaka OpenCV. Kami mencapai akurasi yang baik dan stabilitas yang terlihat dari gerakan robot. Teknologi logika fuzzy juga memiliki potensi untuk dikembangkan lebih lanjut dan diterapkan pada sistem kontrol otomatis lainnya. Pada penelitian ini, kami menggunakan bahasa pemrograman Python dan akses motor menggunakan kontroler logika fuzzy. Hasil dari penelitian ini menunjukkan bahwa penggunaan pendekatan kontroler logika fuzzy yang dikombinasikan dengan library OpenCV merupakan pilihan yang efektif untuk meningkatkan performa line-following robot pada Jetbot.





2022
-
 Development of Javanese Speech Emotion Database (Java-SED)Fatchul Arifin, Ardy Seto Priambodo, Aris Nasuha, and 2 more authorsIndonesian Journal of Electrical Engineering and Informatics (IJEEI), 2022
Development of Javanese Speech Emotion Database (Java-SED)Fatchul Arifin, Ardy Seto Priambodo, Aris Nasuha, and 2 more authorsIndonesian Journal of Electrical Engineering and Informatics (IJEEI), 2022Javanese is one of the most widely spoken regional languages in Indonesia, alongside other regional languages. Emotions can be recognized in a variety of ways, including facial expression, behavior, and speech. The recognition of emotions through speech is a straightforward process, but the outcomes are quite significant. Currently, there is no database for identifying emotions in Javanese speech. This paper aims to describe the creation of a Javanese emotional speech database. Actors from the Kamasetra UNY community who are accustomed to performing in dramatic roles participated in the recording. The location where recordings are made is free of interference and noise. The actors of Kamasetra have simulated six types of emotions, including happy, sad, fear, angry, neutral, and surprised. The cast consists of ten people between the ages of 20 and 30, including five men and five women. Both humans (30 Javanese-speaking verifiers ranging in age from 17 to 50) and a machine learning system (30 Javanese-speaking verifiers with ages between 17 and 50) verify the database that has been created. The verification results indicate that the database can be used for Javanese emotion recognition. The developed database is offered as open-source and is freely available to the research community at this link https://beais-uny.id/dataset/
-
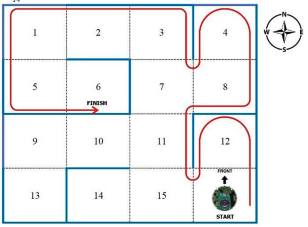 Implementasi Algoritma Path Planning dan Mapping Arena pada Mobile RobotDaffa Fauzan Adryady, Andi Prasetyo, Hafizal Perspicarhanggasidhi Shatyaziamawan, and 1 more authorJurnal Teknik Elektro dan Komputer TRIAC, 2022
Implementasi Algoritma Path Planning dan Mapping Arena pada Mobile RobotDaffa Fauzan Adryady, Andi Prasetyo, Hafizal Perspicarhanggasidhi Shatyaziamawan, and 1 more authorJurnal Teknik Elektro dan Komputer TRIAC, 2022Kemajuan teknologi yang pesat di berbagai bidang menyebabkan berkembangnya berbagai aspek kehidupan. Kemajuan dalam bidang robotika adalah contoh berkembangnya berbagai jenis robot. Salah satu jenis robotnya adalah Mobile Robot. Mobile Robot adalah robot yang memiliki roda untuk menggerakannya. Contoh penerapan dari Mobile Robot adalah Algoritma Path Planning dan Mapping Arena pada Mobile Robot yang berfungsi agar robot dapat memetakan sebuah lintasan yang dilaluinya dan setelah itu robot akan menemukan jalan untuk menyelesaikan arena sesuai dengan tujuan yang sudah di setting. Untuk dapat memetakan lintasannya, diperlukan sensor ultrasonik dan juga IMU (Inertial Measurement Unit). Sensor ultrasonik disini difungsikan untuk mendeteksi adanya dinding atau tidak, sedangkan IMU adalah sensor yang memanfaatkan giroskop, dan akselerometer. Giroskop pada IMU berfungsi untuk mengukur kecepatan sudut dari tiga arah sumbu, yaitu sumbu X, Y dan juga Z. Akselerometer pada IMU berfungsi untuk mengukur percepatan. IMU pada Mapping Arena Mobile Robot ini akan difungsikan untuk mengatur derajat perputaran dari robot. Robot ini nantinya akan berputar untuk mengetahui letak dinding disekitarnya dan posisi dinding tersebut akan dipetakan ke dalam bentuk arah mata angin. Robot akan diimplementasikan pada software webots. Algoritma Path Planning menggunakan modul deque yang digunakan dalam Mobile Robot bisa menuju ke finish yang sudah ditentukan dalam arena labirin dengan waktu yang sangat cepat jika dibandingkan dengan menggunakan algoritma PID Right Wall Follower. Algoritma Path Planning ini lebih efisien terhadap waktu.
-
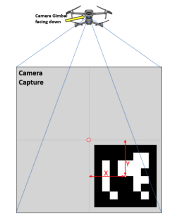 A Vision and GPS Based System for Autonomous Precision Vertical Landing of UAV QuadcopterArdy Seto Priambodo, Fatchul Arifin, Aris Nasuha, and 1 more authorIn Journal of Physics: Conference Series, 2022
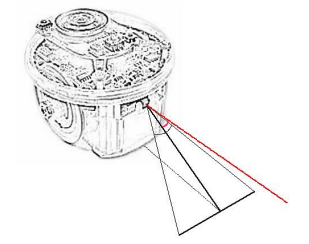
A Vision and GPS Based System for Autonomous Precision Vertical Landing of UAV QuadcopterArdy Seto Priambodo, Fatchul Arifin, Aris Nasuha, and 1 more authorIn Journal of Physics: Conference Series, 2022This research aims to develop an algorithm for the precision vertical landing process on a quadcopter using GPS sensors and computer vision. This research consists of 2 main parts: GPS-based control used by the quadcopter to return to the home area and computer vision-based control in the form of ArUco marker detection, which is used by the quadcopter in order to land precisely. Detection of the ArUco marker that is used goes through 2 stages: the application of threshold and ratio and the process of calculating the black and white area, which can then be searched for four corners of the marker. The algorithm designed works well on the Webots simulation program with mid-computer specifications. The ArUco marker detection process is fast and reliable, so it does not overload the processor unit so that the simulation process can run well. From 30 tests with different initial positions, the average error of the landing position of the quadcopter at coordinate X is 0.02 meters, and coordinates Y is 0.03 meters. All test results show that the quadcopter can land inside the landing pad area without any parts coming out.
-
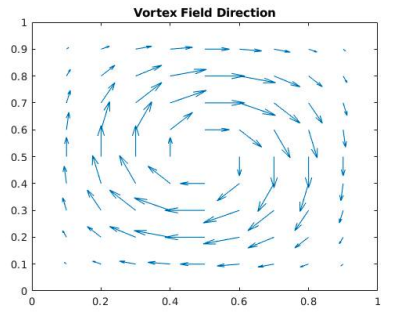 Vortex artificial potential field for mobile robot path planningAris Nasuha, Ardy Seto Priambodo, and Gilang Nugraha Putu PratamaIn Journal of Physics: Conference Series, 2022GSCC: 0000005 Issue: 1
Vortex artificial potential field for mobile robot path planningAris Nasuha, Ardy Seto Priambodo, and Gilang Nugraha Putu PratamaIn Journal of Physics: Conference Series, 2022GSCC: 0000005 Issue: 1Artificial Potential Field (APF) is one of path planning strategies which offers a relatively low cost on computational. It has been implemented in many real-time applications. Unfortunately, it is quite susceptible to local minima problems. In this paper, we offer a scheme for escaping local minima by using vortex field. Based on the results and simulation, it can be verified that the vortex field prevails to navigate the path while escaping local minima.




2021
-
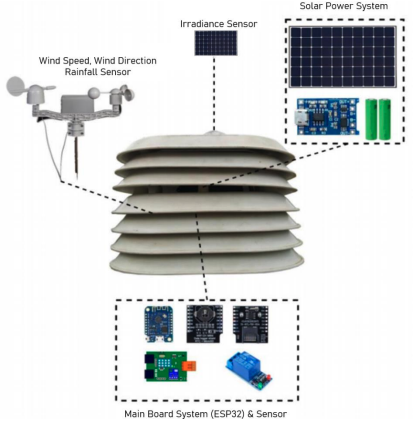 Design & implementation of solar powered automatic weather station based on esp32 and gprs moduleArdy Seto Priambodo, and Andri Prima NugrohoIn Journal of physics: Conference series, 2021
Design & implementation of solar powered automatic weather station based on esp32 and gprs moduleArdy Seto Priambodo, and Andri Prima NugrohoIn Journal of physics: Conference series, 2021The fundamental aim of this project is to develop a solar-powered automatic weather station (AWS), which can be accessed via the website. Users can find out the weather changes in an area without needing to come to the area and can do an analysis of irrigation water needs. This design uses ESP32 as main processor. The measure weather parameters include temperature and humidity using HDC1080 sensor, wind speed using an anemometer sensor, wind direction using a wind vane sensor, air pressure using BME280, rainfall using a tipping bucket sensor, and the last small solar panel for irradiance sensor. AWS has two working modes, normal and maintenance mode. During maintenance mode, sensor data will be displayed on a local website that can be accessed via a wifi network broadcasted by ESP32. In normal mode, the ESP32 will send sensor data to the cloud using SIM800L GPRS Module. The system proposed is also designed to have a feature to log sensor data locally in SD card. Watchdog timer circuit uses timer 555 implemented in this project for the recovery system from the failure process. Power sources are limited, so the system must be put into deep-sleep mode state when not processing data. Data transmission is carried out periodically with an interval of 5-6 minutes. Test results show that the sending of sensor data can be received by the cloud with an acceptance rate of up to 98%.
-
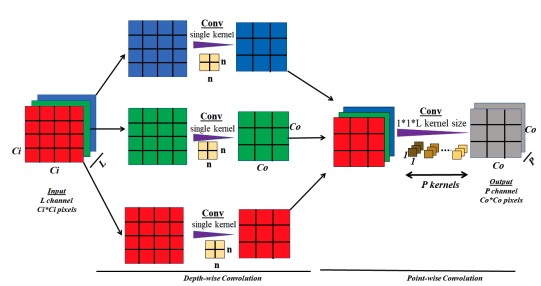 Real time emotion classification based on convolution neural network and facial featureAris Nasuha, Fatchul Arifin, Ardy Seto Priambodo, and 2 more authorsIn Journal of Physics: Conference Series, 2021
Real time emotion classification based on convolution neural network and facial featureAris Nasuha, Fatchul Arifin, Ardy Seto Priambodo, and 2 more authorsIn Journal of Physics: Conference Series, 2021Health problems due to emotion disorder should not be taken lightly because they have worse effects on health. Emotion disorder leads to prolonged stress and causes mental fatigue. Therefore, emotions need to be classified as early as possible. This classification result can be utilized to determine a person’s emotion and treatments required. In this paper, we proposed emotion classifier based on facial features. Here, we used Convolution Neural Network (CNN) to extract facial features from input images and classify them into 7 basic emotions: angry, sad, happy, neutral, fear, disgust, and surprise. Dept-wise separable convolution is applied, instead of the ordinary convolution in CNN, to reduce the number of trainable parameters so that the overall architecture of CNN can be made as simple as possible without compromising the accuracy. The simple architecture of the CNN allows us to make it work in real time. Our proposed method achieves an accuracy of 66% on 3.589 input images of FER2013 data set.
-
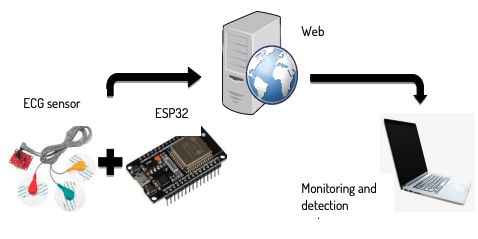 Design of robust heart abnormality detection system based on wavelet denoising algorithmAnggun Winursito, Fatchul Arifin, Aris Nasuha, and 1 more authorIn Journal of Physics: Conference Series, 2021
Design of robust heart abnormality detection system based on wavelet denoising algorithmAnggun Winursito, Fatchul Arifin, Aris Nasuha, and 1 more authorIn Journal of Physics: Conference Series, 2021The technology that continues to be developed by many researchers today is an automatic heart attack detection system based on an Electrocardiogram (ECG) signal. Several other studies have been carried out to build an Internet of Things (IoT) based heart abnormality detection system. Based on the analysis of related studies that have been carried out previously, several researchers have developed an ECG signal-based heart abnormality detection system using clean ECG signal data. While the reality of the concept of an IoT-based detection system, the process of recording ECG signal data on the sensor, the process of sending data to the server, and the process of retrieving data from the server are vulnerable to noise exposure. ECG signal containing noise will greatly affect the accuracy of system detection. This paper proposes the development of a noise-resistant heart condition detection system using a wavelet denoising algorithm. The process of denoising ECG signals using the Wavelet algorithm is generally able to improve the accuracy of detecting noisy ECG signals. The most significant increase in accuracy is seen in the low SNR value. The Daubechies 4 (db4) denoising algorithm is the best-performing algorithm. The ECG signal classification method uses the Artificial Neural Network (ANN) algorithm. Detection system hardware is also designed in this research using the concept based on the Internet of Things.
-
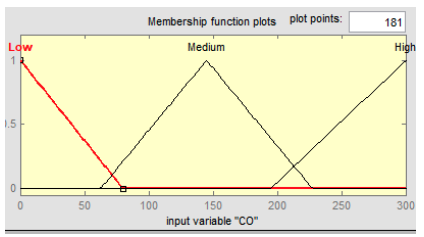 Smart Air Filter Based on Activated Charcoal and Aloe Vera Using Fuzzy Logic AlgorithmFatchul Arifin, Wahyu Ramadhani Gusti, Aris Nasuha, and 2 more authorsIn Journal of Physics: Conference Series, 2021
Smart Air Filter Based on Activated Charcoal and Aloe Vera Using Fuzzy Logic AlgorithmFatchul Arifin, Wahyu Ramadhani Gusti, Aris Nasuha, and 2 more authorsIn Journal of Physics: Conference Series, 2021Smoking is one of the main risk factors of several chronic diseases such as lung cancer, upper respiratory tract cancer, heart disease, stroke, bronchitis, emphysema and others, even smoking can cause death. Cigarette smoke inhaled by passive smoking is the main cause of lung cancer in people who are not smokers. The risk of lung cancer increases by 20-30% in non-smokers but always surrounded by cigarette smoke, compared to non-smokers who are not exposed to smoke. This study aims to develop a smart device to filter cigarette smoke so that the air released from this device is free from the dangers of cigarette smoke. The materials used in this device as a cigarette smoke filter are activated charcoal and aloe vera, the pores of the charcoal open and can become adsorbents. This device uses fuzzy logic as a control method that can provide decisions that resemble human decisions. Arduino is used to adjust the fan rotation in absorb cigarette smoke and the LCD to display the level of cigarette smoke.
-
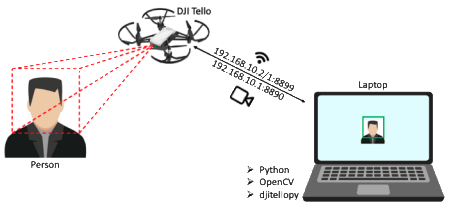 Face tracking for flying robot quadcopter based on haar cascade classifier and PID controllerArdy Seto Priambodo, Fatchul Arifin, Aris Nasuha, and 1 more authorIn Journal of Physics: Conference Series, 2021
Face tracking for flying robot quadcopter based on haar cascade classifier and PID controllerArdy Seto Priambodo, Fatchul Arifin, Aris Nasuha, and 1 more authorIn Journal of Physics: Conference Series, 2021The fundamental aim of this research is to develop a face detection system for a quadcopter in order to follow the face object. This research has two main stages, namely the face detection stage and the position control system. The face detection algorithm used in this research is the haar cascade method which is run using the python and OpenCV programming languages. The algorithm worked well, getting around 16fps on a low spec computer without a GPU unit. The results of the face detection algorithm are proven to be able to recognize faces from the camera installed on the DJI Tello mini drone. The mini drone was chosen because it is small and light, so it is harmless, and testing can be carried out indoors. Besides, the DJI Tello can be programmed easily using the python programming language. The drone’s position is then compared with the set point in the middle of the image to obtain errors so that control signals can be calculated for up/down, forward/backward, and right/left movements. From the testing results, the response speed that occurs in the right/left and up/down movements is less than 2 seconds, while for the forward/backward movement, it is less than 3 seconds.
-
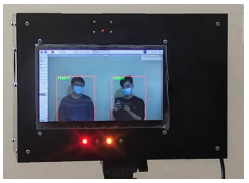 Alat Peringatan Pelanggaran Physical Distancing Berbasis Raspberry Pi sebagai Upaya Preventif Penyebaran Covid-19 pada Era New NormalHilal Fahrul Hamam, Irwan Ardiansyah, Burhan Dwi Ardiandyah, and 3 more authorsJOURNAL ZETROEM, 2021
Alat Peringatan Pelanggaran Physical Distancing Berbasis Raspberry Pi sebagai Upaya Preventif Penyebaran Covid-19 pada Era New NormalHilal Fahrul Hamam, Irwan Ardiansyah, Burhan Dwi Ardiandyah, and 3 more authorsJOURNAL ZETROEM, 2021The Covid-19 pandemic that hit Indonesia forced the Indonesian population to be ready with a new normal order. With this condition, it is hoped that the community can implement changes to the new order of life by implementing health protocols. But nowadays, people often violate health protocols, physical distancing, which is one form of prevention in the new normal era. The innovation of a Raspberry Pi-based tool designed to produce warnings for physical distancing violations is expected to minimize violations. The camera installed on the system will help detect the distance between two or more people and will give a warning to immediately carry out physical distancing if the measured distance is less than 1 meter. The purpose of writing this research is to design a system and concept of "Preventive Efforts for the Spread of Covid-19 Through a Raspberry Pi-Based Distance Monitoring System". The method of writing this article uses the concept of a literature study involving several studies and scientific findings in the form of secondary data from research results that have been published in scientific journals. From the results of the tests that have been carried out, it is known that the tool has succeeded in detecting physical distancing violations between two or more people. After the tool can detect a violation, the tool emits a warning sound to inform the violation that has occurred. From the result, it can be concluded that this system proposed can run well as expected.






2019
-
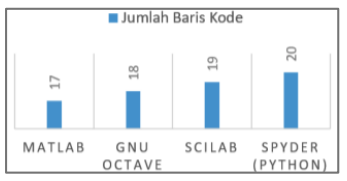 Studi Komparasi Simulasi Sistem Kendali PID Pada Matlab, GNU Octave, SciLab dan SpyderArdy Seto PriambodoElinvo (Electronics, Informatics, and Vocational Education), 2019
Studi Komparasi Simulasi Sistem Kendali PID Pada Matlab, GNU Octave, SciLab dan SpyderArdy Seto PriambodoElinvo (Electronics, Informatics, and Vocational Education), 2019Dalam penelitian ini perbandingan antara perangkat lunak MATLAB, GNU Octave, Scilab dan Spyder akan diamati. Proses yang menjadi obyek dalam penelitian ini adalah sistem kendali PID yang digunakan untuk mengendalikan plant yang berupa model motor DC. Fungsi alih dari motor DC merupakan model dari motor DC yang diturunkan dari hukum newton ke-2 dan hukum kirchoff tegangan. Simulasi dilakukan pada perangkat lunak menggunakan 2 cara yaitu kode program dan block programming. Jumlah baris kode program yang terpendek adalah MATLAB dengan 17 baris dan yang terpanjang adalah Spyder dengan 20 baris kode program. Untuk block programming hanya dapat dilakukan pada MATLAB dan Scilab karena perangkat lunak yang lain tidak memiliki fitur tersebut. Waktu eksekusi kode program diamati padan masing-masing perangkat lunak dan Spyder adalah yang tercepat dengan waktu 0.0682 detik. Hasil plot dari masing-masing perangkat lunak tidak banyak memiliki perbedaan. MATLAB adalah perangkat lunak yang terbaik dengan fiturnya namun diperlukan biaya lisensi dalam menggunakannya.

2018
-
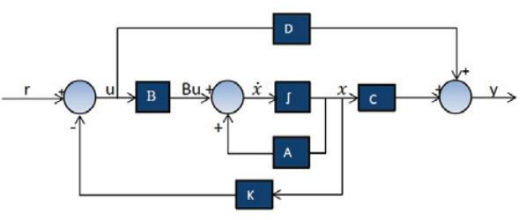 Penalaan PID Berbasis LQR Untuk Mode Terbang Hover Pada QuadrotorArdy Seto Priambodo, Adha Imam Cahyadi, and Samiadji HerdjunantoUniversitas Gadjah Mada, 2018
Penalaan PID Berbasis LQR Untuk Mode Terbang Hover Pada QuadrotorArdy Seto Priambodo, Adha Imam Cahyadi, and Samiadji HerdjunantoUniversitas Gadjah Mada, 2018Currently Unmanned Aerial Vehicle (UAV) is undergoing rapid development. Quadrotor is one of the popular types of UAVs. Quadrotor has many advantages compared to other types of UAVs. One of the advantage is that the quadrotor can fly hover. Therefore quadrotor can be used in applications that require precision. Quadrotor consists of 4 motor used to rotate the propeller. Thrust force is produced by rotation of the propeller. There are 6 outputs that can be measured from the quadrotor which is translation position and rotation position (or attitude). Because input is less than output then quadrotor is under-actuated system. Therefore, quadrotor system is susceptible non-linear, instability, and control difficult. In this research is presented a mathematical model that represents the dynamics of a quadrotor. Beside discuss about the math model of quadrotor, this research proposes a PID tuning method that will be used to stabilize hover mode of quadrotor. Value of parameter PID control obtained from LQR method. Quadrotor model and control system proposed will be run on matlab simulink. To find out the performance level of the proposed method, the results will be compared with conventional PID control systems and LQR control systems. Respond obtained from the simulation shows that the proposed control system has the fastest settling time and without but classic LQR control is the best in robustness.

2017
-
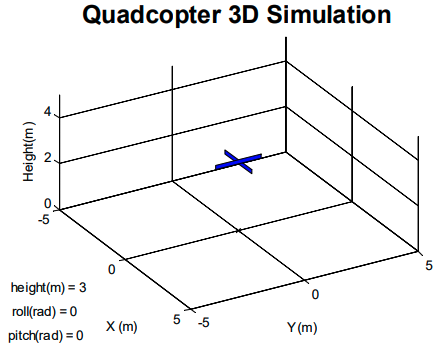 Analisis Kestabilan Terbang Quadrotor Dengan Pengendali PD Terhadap GangguanArdy Seto Priambodo, Adha Imam Cahyadi, and Samiadji HerdjunantoIn The 9th National Conference on Information Technology and Electrical Engineering, 2017
Analisis Kestabilan Terbang Quadrotor Dengan Pengendali PD Terhadap GangguanArdy Seto Priambodo, Adha Imam Cahyadi, and Samiadji HerdjunantoIn The 9th National Conference on Information Technology and Electrical Engineering, 2017Tujuan dari penelitian ini adalah menghasilkan sistem kendali pada sebuah obyek quadrotor yang dapat mengkompensasi gangguan. Formula Euler-Newton digunakan dalam menentukan model matematika dari sebuah obyek quadrotor. Sistem kendali yang dirancang pada penelitian ini adalah Sistem Kendali PD (Proporsional-Derivatif). Sistem kendali PD memiliki parameter Kp dan Kd yang besarnya mempengaruhi respon dari keluaran sistem kendali. Model matematika dari quadrotor dan sistem kendali PD yang dirancang kemudian akan dijalankan secara simulasi pada perangkat lunak MATLAB. Terdapat 4 buah sistem kendali yang masing-masing bekerja secara sendiri-sendiri. Gangguan yang diberikan pada simulasi model quadrotor berupa perubahan sudut pada roll, pitch, dan yaw serta perubahan ketinggian. Hasil dari simulasi ditampilkan dalam 3 dimensi sehingga memudahkan dalam proses analisis. Dari hasil simulasi menunjukkan bahwa sistem kendali PD dapat bekerja sesuai yang diharapkan pada saat terdapat gangguan.
-
 Perancangan Sistem Kendali PD untuk Kestabilan Terbang Melayang UAV QuadcopterArdy Seto Priambodo, Adha Imam Cahyadi, and Samiadji HerdjunantoIn The 9th National Conference on Information Technology and Electrical Engineering, 2017
Perancangan Sistem Kendali PD untuk Kestabilan Terbang Melayang UAV QuadcopterArdy Seto Priambodo, Adha Imam Cahyadi, and Samiadji HerdjunantoIn The 9th National Conference on Information Technology and Electrical Engineering, 2017Penelitian berikut ini fokus membahas tentang model dari sebuah quadcopter dan sistem kendali linier yang bekerja pada saat quadcopter terbang melayang. Model matematika dari quadcopter didapatkan dari analisis kinematik dan dinamik yang ada pada quadcopter. Model dari quadcopter ketika saat terbang melayang dapat disederhanakan melalui linierasi sehingga menjadi sistem SISO (Single Input Single Output). Sistem kendali linier yang digunakan adalah Sistem Kendali PD (Proporsional Derivatif). Software yang digunakan untuk mensimulasikan hasil dari perancangan pada penelitian ini adalah matlab. Nilai dari parameter kendali proporsional dan derivatif didapatkan dari hasil eksperimen yang terstruktur. Hasil nilai parameter Kp dan Kd yang didapatkan dari penelitian ini adalah Kp = 25 dan Kd = 35. Respon yang dihasilkan adalah baik, hal ini dapat dilihat pada simulasi memiliki settling time 4.66 detik dan tanpa overshot.
- Perancangan Sistem Kontrol PD untuk Stabilitas Terbang UAV QuadcopterArdy Seto Priambodo2017


2012
-
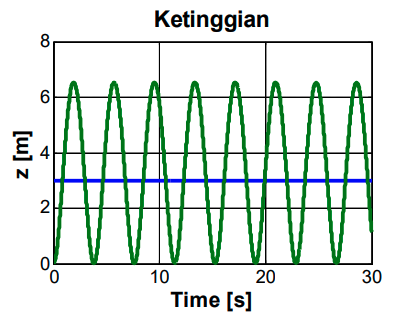
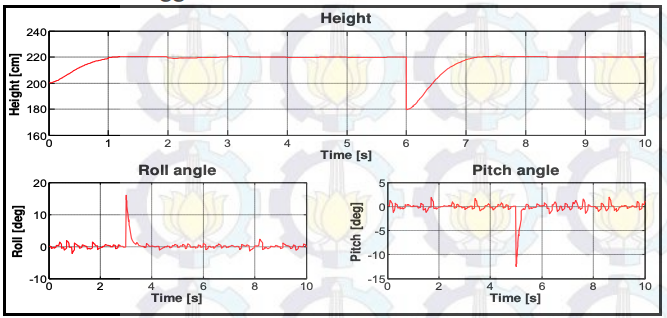 Perancangan dan Implementasi Sistem Kendali PID untuk Pengendalian Gerakan Hover pada UAV QuadcopterArdy Seto Priambodo, Katjuk Astrowulan, and Joko SusilaJURNAL TEKNIK POMITS, 2012
Perancangan dan Implementasi Sistem Kendali PID untuk Pengendalian Gerakan Hover pada UAV QuadcopterArdy Seto Priambodo, Katjuk Astrowulan, and Joko SusilaJURNAL TEKNIK POMITS, 2012Sistem kendali banyak memegang peranan penting dalam ilmu pengetahuan, teknologi maupun industri. Penelitian yang ditujukan untuk pengembangan sistem kendali sampai sekarang masih terus dilakukan untuk menjawab kebutuhan akan sistem kendali yang semakin kompleks. Quadcopter merupakan salah salah satu jenis rotorcraft yang memiliki 4 buah rotor pada ujung-ujung frame. Untuk menggerakkan quadcopter, yang harus dilakukan adalah mengatur kecepatan putaran tiap motor. Secara teori quadcopter dapat terbang melayang pada satu titik, kegiatan ini dinamakan hover. Untuk menghasilkan gerakan hover pada quadcopter, kecepatan motor harus dikendalikan pada daerah kecepatan nominal. Pada tugas akhir kali ini untuk mengatur gerakan hover dari quadcopter digunakan sistem kendali PD yang memiliki konstanta Kp dan Kd. Ada 3 buah kontroler individual yaitu kontroler PD roll, kontroler PD pitch, dan kontroler PD ketinggian. Perancangan sistem kendali PD pada simulasi yang digunakan untuk mempertahankan posisi hover pada quadcopter menghasilkan respon ketinggian dan sudut roll & pitch dengan besar error steady state = 0. Nilai parameter yang didapatkan dari hasil tuning terstruktur pada simulasi adalah pada kontroler roll & pitch Kp=40, Kd=5 dan pada kontroler ketinggian Kp=35, Kd=17. Respon hasil implementasi pada quadcopter belum sesuai pada hasil simulasi. Masih terdapat osilasi pada respon ketinggian yang besarnya +/- 15 cm disekitar set point dikarenakan pembacaan sensor ketinggian yang kadang tidak sesuai dengan ketinggian terukur. Selain itu koreksi sudut roll & pitch pada kontroler rol & pitch juga masih terdapat error +/- 5°.
